INDEMIND Vi-SLAM¶
SLAM (Simultaneous Localization and Mapping),即时定位与地图构建。SDK 提供的 Vi-SLAM 包含有前端特征提取,匹配,后端优化,闭环、建图和重定位功能。
Vi-SLAM 支持 Windows 及 Linux 平台,有效的节约算法开发周期及成本,让开发者可以 迅速调试及部署,直接应用于机器人、无人机、AGV、AR/VR 等领域。
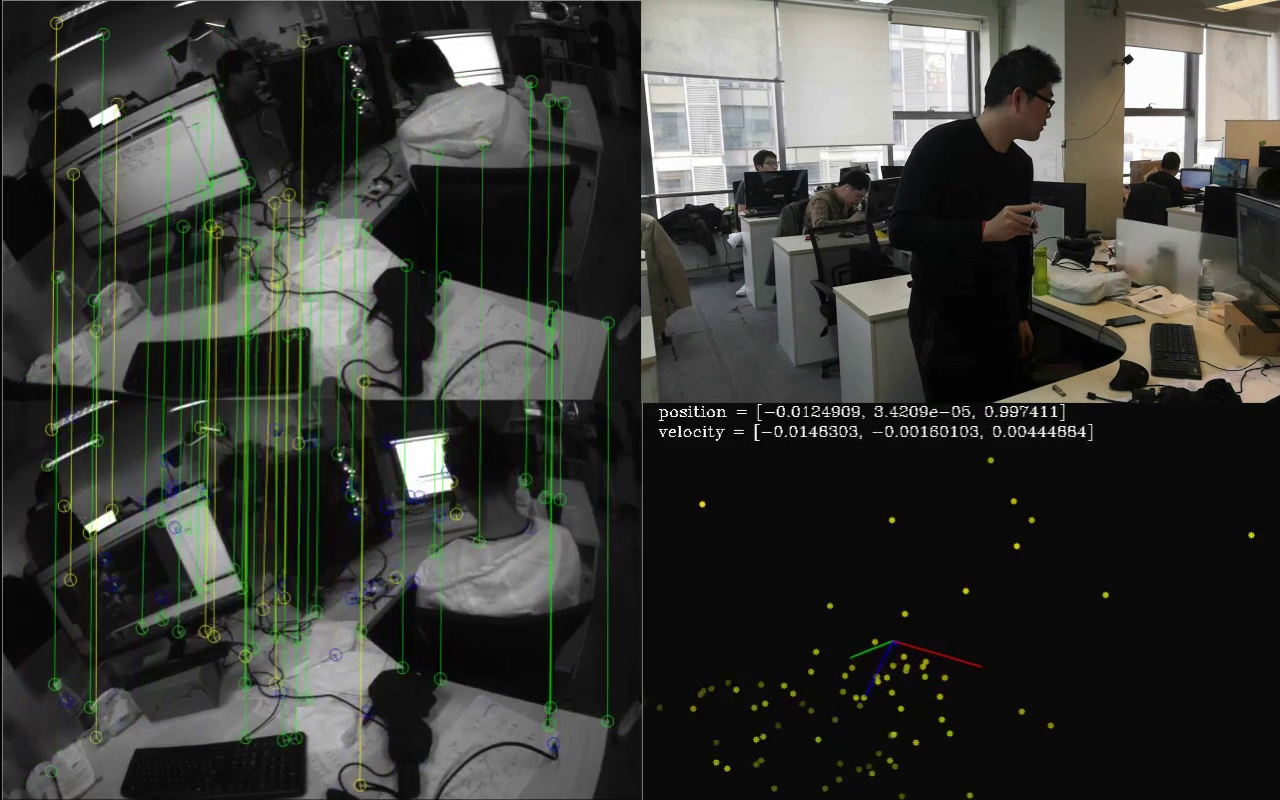
Vi-SLAM 工作过程中的特征点匹配显示状态控制在文件“slam_imp.yaml”中, displayImages: true 表示打开特征点匹配显示,displayImages: false 表示关闭特征点匹配显示, 该状态默认开启。
Vi-SLAM开启运行¶
MRCONFIG config = { 0 };
config.bSlam = true; //true 开启 SLAM,false 不开启 SLAM
Vi-SLAM关闭¶
当运行 SDK,但是不需要 SDK 自带 SLAM 运行时,将 MRCONFIG 结构体中的 bSlam 设置 为 false。
效果Demo示意¶