获取IMU数据¶
该部分需要通过SDK调用IMU回调函数获取补偿后的IMU数据,具体如下:
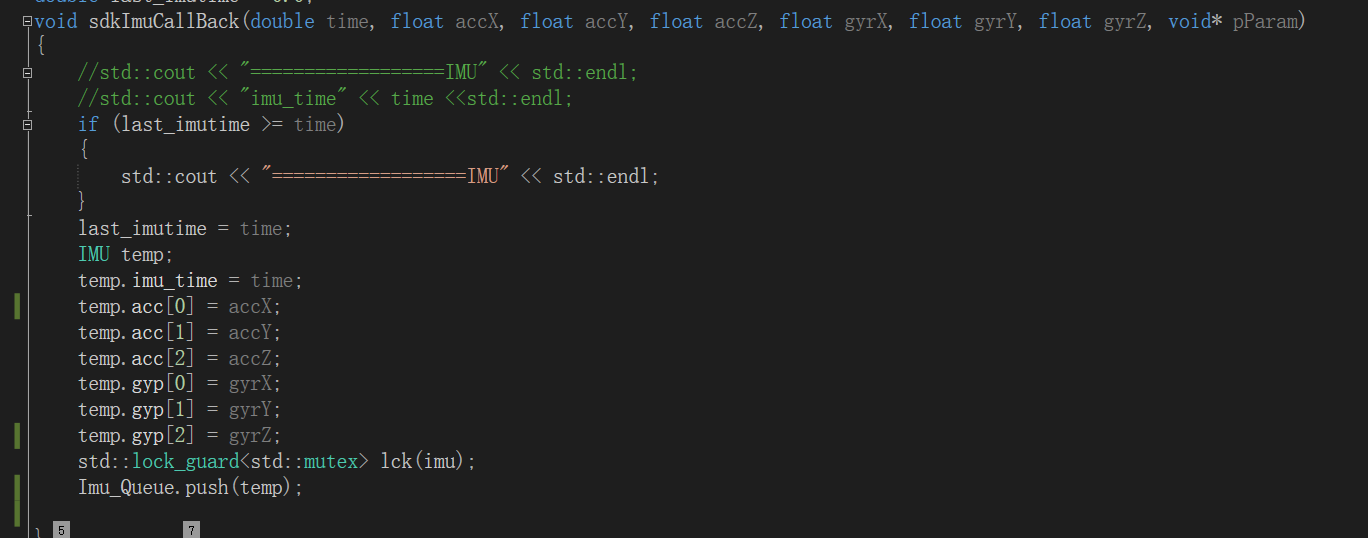
定义回调函数
void IMUCallback(double time, float accX, float accY, float accZ, float gyrX, float gyrY, float gyrZ, void* pParam){}
调用回调函数
pSDK->RegistModuleIMUCallback(IMUCallback,param);
小技巧
获取IMU补偿数据:时间,单位:s;陀螺XYZ,陀螺单位:°/s;加速度计XYZ,加速度计单位:g(g0取9.8019967)。