Ubuntu SDK安装¶
注解
安装必须硬件和软件 需要显卡Geforce GTX 1050 以上,并且把显卡驱动安装好,CUDA版本9.0。没有GPU,如深度解算等功能无法正常运行。
程序下载¶
小技巧
下载完解压出以下文件:
SDK主要包含:demo,doc,include、lib四个文件夹。
demo文件夹下放置的是DEMO程序;
doc文件夹下放置的是说明文档;
include文件夹下面放置的是需要用到的头文件;
lib包括Ubuntu 1604和Ubuntu 1804系统库文件,库文件夹下放置的是所依赖的各部分的链接文件.so与.a文件以及配置所用的.yaml与.json文件;
编译Demo¶
小技巧
编译前的准备
a)安装cmake
sudo apt-get install cmake
b)安装google-glog + gflags
sudo apt-get install libgoogle-glog-dev
c)安装BLAS & LAPACK
sudo apt-get install libatlas-base-dev
d)安装SuiteSparse and CXSparse
sudo apt-get install libsuitesparse-dev
e)编译器
使用Ubuntu 16.04编译demo程序需要使用GCC5.4版本,否则可能链接失败。 使用Ubuntu 18.04编译demo程序需要使用GCC7.3版本,否则可能链接失败。
编译demo
解压后的文件在Linux上显示如下:

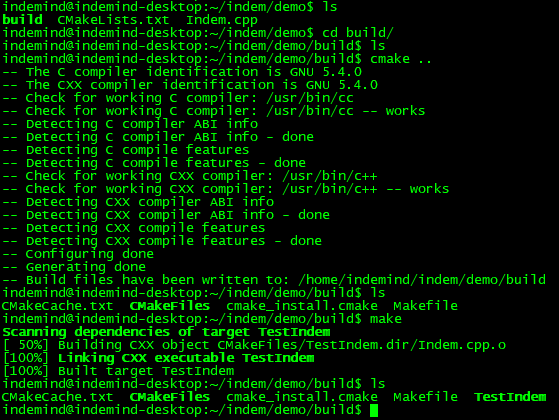
现以在Ubuntu 16.04上使用GCC5.4编译demo为例,操作如下:
通过命令行进入demo目录里面使用命令mkdir build 创建一个build目录,用来放编译demo程序。

进入build目录
cd build
cmake ..
make
编译demo,操作截图如下:
执行demo程序¶
把刚才编译的可执行文件TestIndem拷贝到刚才解压SDK的lib目录下的1604目录下,在lib/1604目录下使用 sudo ./TestIndem.sh 命令启动程序。
为了减少手动拷贝操作,TestIndem.sh里有自动拷贝TestIndem到lib/1604目录的脚本,demo和lib的目录关系不要轻易改变,否则脚本失效。
TestIndem和TestIndem.sh 需要可执行权限。 使用命令chmod 777 TestIndem 和chmod 777 TestIndem.sh 进行修改。
为了提高系统稳定性,请运行时使用超级用户(root权限)运行,或者使用 “sudo ./程序名” 运行,例如DEMO运行“sudo ./TestIndem.sh”。
如果用户需要自己写demo程序,请参照此demo,把CMakeLists.txt写好就可以进行编译。
用户基于SDK开发的程序,参考demo操作流程。
如果用户自定义生成demo的可执行文件的名字,还需要在TestIndem.sh里用其替换掉TestIndem。
警告
在Ubuntu 18.04上使用GCC7.3编译demo的时候,需要把demo里的CMakeLists.txt的1604改成1804才能编译成功,编译成功后把TestIndem拷贝到lib/1804下运行。
调用SDK接口说明¶
a)创建SDK对象
CIMRSDK* pSDK = new CIMRSDK();
b)设置使用的SLAM
MRCONFIG config = { 0 };
config.bSlam = true; //true开启SLAM,false不开启SLAM
c)获取模组图像数据
pSDK->RegistModuleCameraCallback(SdkCameraCallBack,NULL);
d)获取IMU数据
pSDK->RegistModuleIMUCallback(sdkImuCallBack,NULL);
e)获取SLAM结果
pSDK->RegistModulePoseCallback(sdkSLAMResult,NULL);
f)获取深度图
pSDK->AddPluginCallback("depthimage", "depth", DepthImageCallback, NULL);
g)释放资源
pSDK->Release();
delete pSDK;
警告
不要在以上回调函数里做延时比较多的操作,比如把数据写入文件等,否则会造成数据丢失,影响数据正确性等后果。
深度图显示¶
显示深度图可以使用opencv来处理,参考如下代码,如下:
在Indem.cpp里增加#include <opencv2/opencv.hpp>
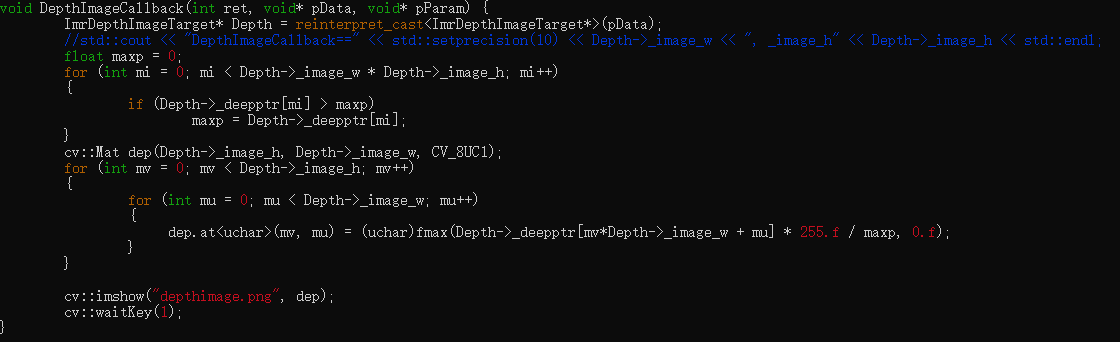
同时,需要把lib/1604或者lib/1804目录下的imr.json文件里的选项Detection.open设置成true才能开启深度图功能。